
-

技术实力
-

品质保障
-

售后无忧
-

支持定制
-

多年经验

联系人: 卫杰
手机:13346685036
邮箱:13569410068@163.com
网址:www.agvxiaoche.com
厂址:新乡经济技术开发区
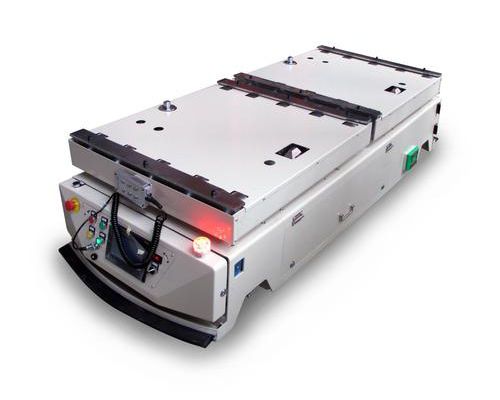
AGV应用越来越普遍,被广泛地应用于物流仓储及柔性化生产线中,可能会有这样的疑问,为什么AGV搬运机器人在遇到障碍时可以躲开,会像人一样选择绕行,其实AGV小车智能的一个重要标志就是自主导航,而完成机器人自主导航有个根本请求——避障。
AGV自动避障是指AGV小车依据采集的障碍物的状态信息,在自动行驶过程中经过传感器感知到阻碍其通行的静态和动态物体时,依照一些办法停止有效地自动避障,然后到达目的点。常用的避障方案:1.红外传感器非接触式障碍物检测;2.激光测距仪进行障碍物检测(成本较高主要用于大型AGV);3接触式机械防撞。
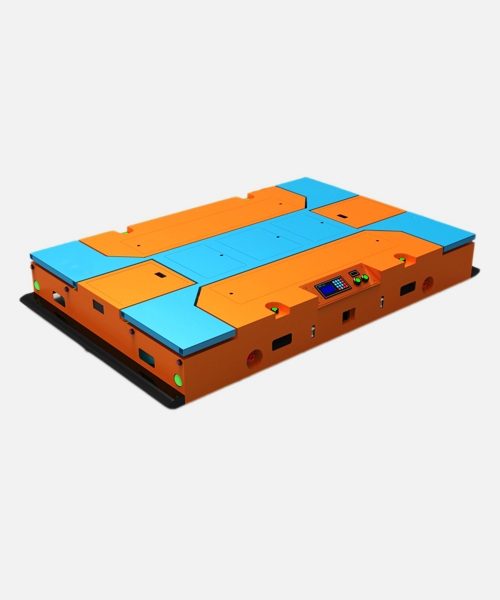
完成避障与导航的必要条件是环境感知,在未知或者是局部未知的环境下避障需求经过传感器获取四周环境信息,包括障碍物的尺寸、外形和位置等信息,因而传感器技术在AGV小车避障中起着非常重要的作用。AGV自动避障运用的传感器主要有超声传感器、视觉传感器、红外传感器、激光传感器等。
智能AGV小车在几种方法中各有各的优点,也有各有各的不足之处。譬如三角测距的红外传感器方法成本很低,但探测不可靠,对于黑色物体就无法有效探测;超声传感器能有效探测到玻璃等物体,但声波可控性较差,容易引起探测的误报,同时不同超声波模块之间的串扰现象也无法解决;激光传感器受控性较好,但对于玻璃等透明物体的探测还是受限于光束的物理特性,无法全部有效探测;视觉方式成本比较高,现阶段技术还不完善,存在探测盲区的问题等。






 地址:新乡经济技术开发区
地址:新乡经济技术开发区 电话:13346685036
电话:13346685036 邮箱:13569410068@163.com
邮箱:13569410068@163.com
