
-

技术实力
-

品质保障
-

售后无忧
-

支持定制
-

多年经验

联系人: 卫杰
手机:13346685036
邮箱:13569410068@163.com
网址:www.agvxiaoche.com
厂址:新乡经济技术开发区
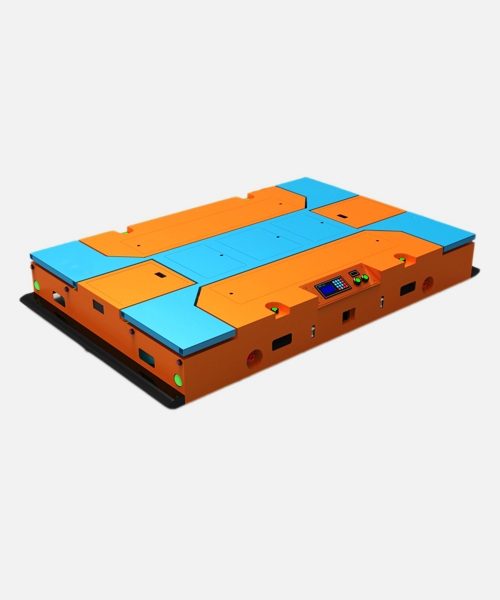
相比于RGV,AGV的控制系统要复杂得多。它属于轮式机器人的范畴,整个系统以一台工控机为中枢控制单元,内部集成两块I/O板作为信息采集单元,一块继电器输出板作为输出单元;每台小车上各有一个主控制器VCU100。VCU100除了通过无线局域网络和中枢控制单元进行通信外,内部还使用104总线CAN通信卡PCM3680,以实现中心处理单元与各信号采集单元间的数据交换。
RGV相对简单、直观。RGV以轨道为导向,只需要一台变频电动机作为行走驱动装置,而无需方向控制;定位信号通过一组滑触线获取,该组滑触线根据任务分为数段(现场为7段),通过电刷跟各段滑触线之间的接触获取位置信号;而与生产线大链的同步,则是通过设置变频器,使小车驱动轮线速度与大链线速相同,因此,当大链线速发生变化时,轨道自行小车变频器的设置需要相应的进行改变。
而AGV则通过导航传感器、地标传感器、跟踪传感器作为实现这部分功能的信息采集单元。它们分别通过与导航磁条、地标磁条和光靶的感应,获取导向、定位及同步信号。磁导航技术正是AGV的核心技术。由于磁条本身具有恒定的磁场信号,不需要额外的信号发生器,导航传感器安装在车体前方,通过检测导航磁条磁场的信号强弱的差异计算AGV与磁条间的偏差和距离;地标传感器位于车体一侧,通过检测地标磁条确定自身位置;两者将所需信号通过CAN总线反馈给主控制器VCU100,控制AGV沿轨道方面行走。
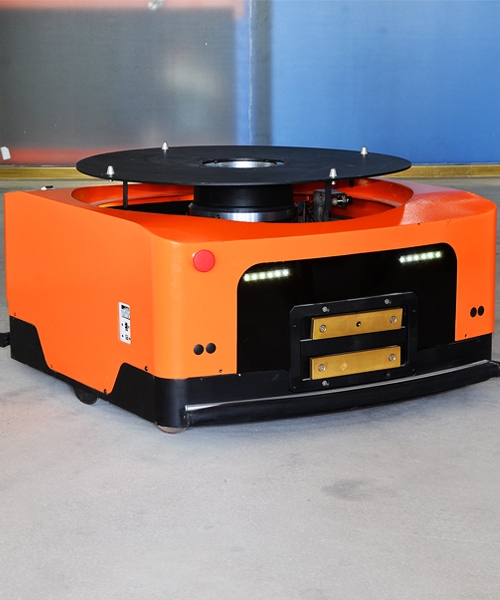
取电方式。在汽车总装线中,底盘合装设备整体处于移动状态中且动作频繁,这就使得取电方式成为技术重点,也是现场维护中设备故障的集中点。轨道自行小车采用滑触取电方式,通过两片碳刷与滑触线接线获取动力电(220 V);而AGV则采用车载电池组,在运行环线中取两个点定点充电,由于电池组为直流,因此该种方式需要另外配制充电动机。






 地址:新乡经济技术开发区
地址:新乡经济技术开发区 电话:13346685036
电话:13346685036 邮箱:13569410068@163.com
邮箱:13569410068@163.com
